
舰船装备
埃及研究人员提出自主水面艇组合导航控制方法
发布日期: 2021-07-28 来源:漆远韬 蓝海星智库 访问量:
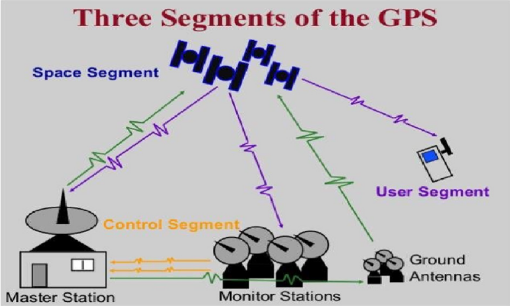
埃及亚历山大大学、阿拉伯科学技术和海运学院共同提出一种GPS/多普勒测速仪(DVL)/微惯性导航(MEMS-INS)组合导航控制方法,显著提高自主水面艇的导航控制精度。
(蓝海星:漆远韬)

相关附件:
相关新闻:
德国蒂森克虏伯公司向土耳其海军交付第二艘Reis级潜艇 (2025-12-01)
俄罗斯可搭载水下无人武器的新型核潜艇下水 (2025-11-06)
美国将正式废除航母电磁弹射,但造蒸汽弹射器的美国企业已经有党委书记了 (2025-11-05)
普京确认“波塞冬”测试成功,揭秘俄“末日武器”的绝对威慑力 (2025-10-30)
德国海军接收新型舰载激光武器系统:反无人机能力实现跨越式提升 (2025-10-29)
韩国KSS-III潜艇第二批次首艇“张英实”号下水 (2025-10-27)
关于我们 | 船舶物资与市场 | 网站地图 | 本站动态 | 访问量:
Copyright@2001-中国船舶信息网络中心 editor@shipol.com.cn
京ICP备10022080号-3 京公网安备11010502044394